Toggle navigation
회사소개
회사소개
파트너 및 주요 고객사
사업소개
사업 분야
민간 차량 분야
국방 차량 분야
농업 차량 분야
모바일 로봇 분야
제품 및 서비스
HiTUNE-I
HiTUNE-G
HiTUNE-D
서비스
기술 경쟁력
핵심 기술
지식 재산권
고객지원
NEWS
자료실
Contact Us(Members Only)
로그인
기술 경쟁력
GNSS 음영 구간* 극복 항법
*빌딩 숲, 터널과 같이 GNSS 신호가 끊기는 구간
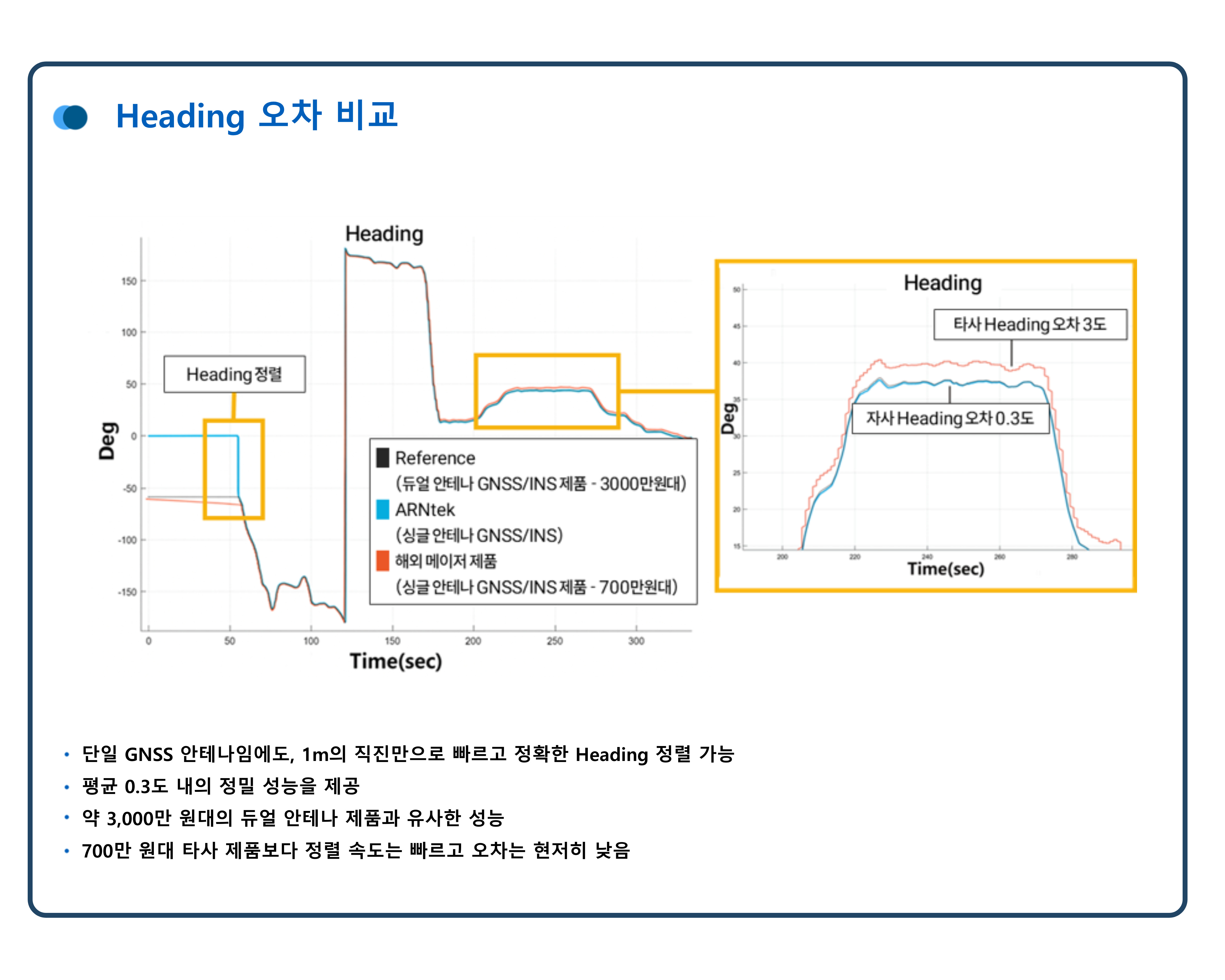
지향각 성능
HiTUNE-G 항법 성능 시연